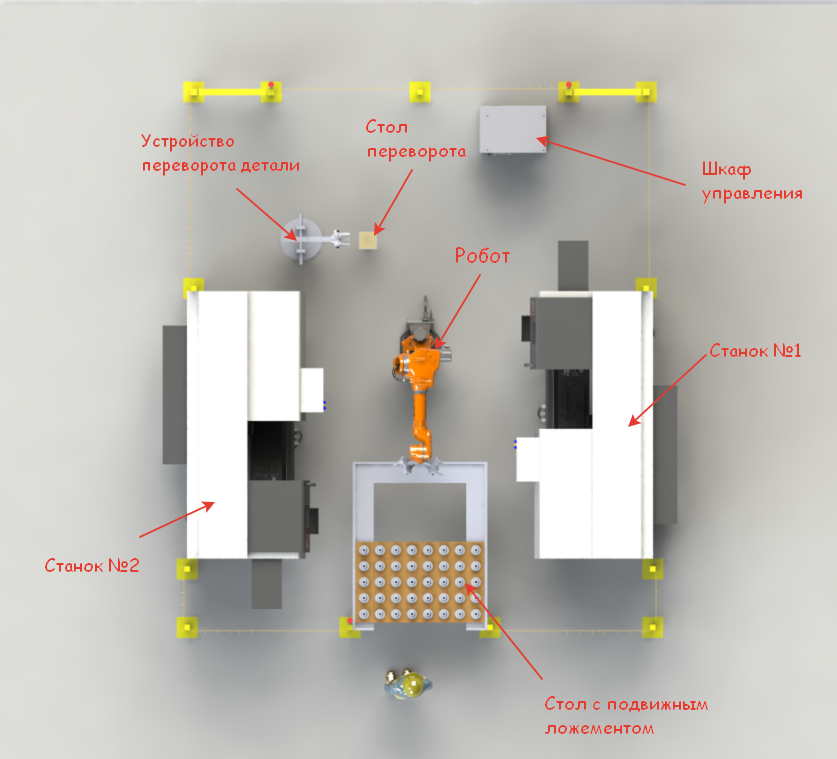
The operator, after selecting the desired program for machining the workpiece, sets 40 workpieces in the table with the movable tray and slides it into the working position. The tray is universal and has slots for any workpiece.
Machine tool 1 opens the door. The robot uses the three-jaw gripper to take the workpiece 1, places it in the chuck of Machine 1 and returns to the home position. The door closes automatically.
The robot picks up workpiece 2 and waits for the door of Machine 1 to open. When a workpiece 1 is machined, the door of machine 1 opens, a signal is given to the robot, the robot removes the machined workpiece 1 (hereafter MW) and installs a workpiece 2.
The robot sends the MW1 part to the part turner with the three-jaw gripper. The part turner clamps MW 1 with the three-jaw gripper and lowers it onto the turn table.