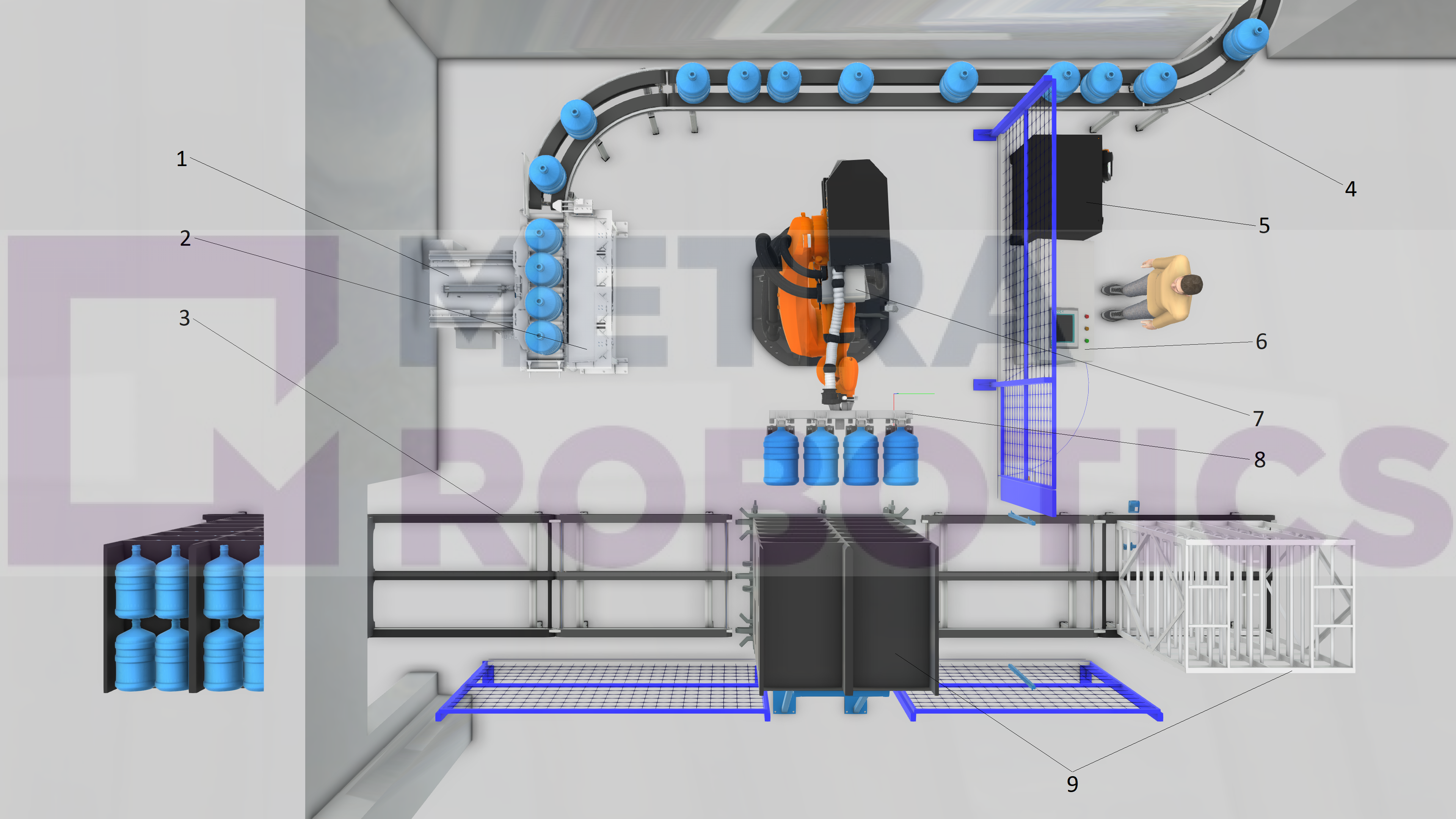
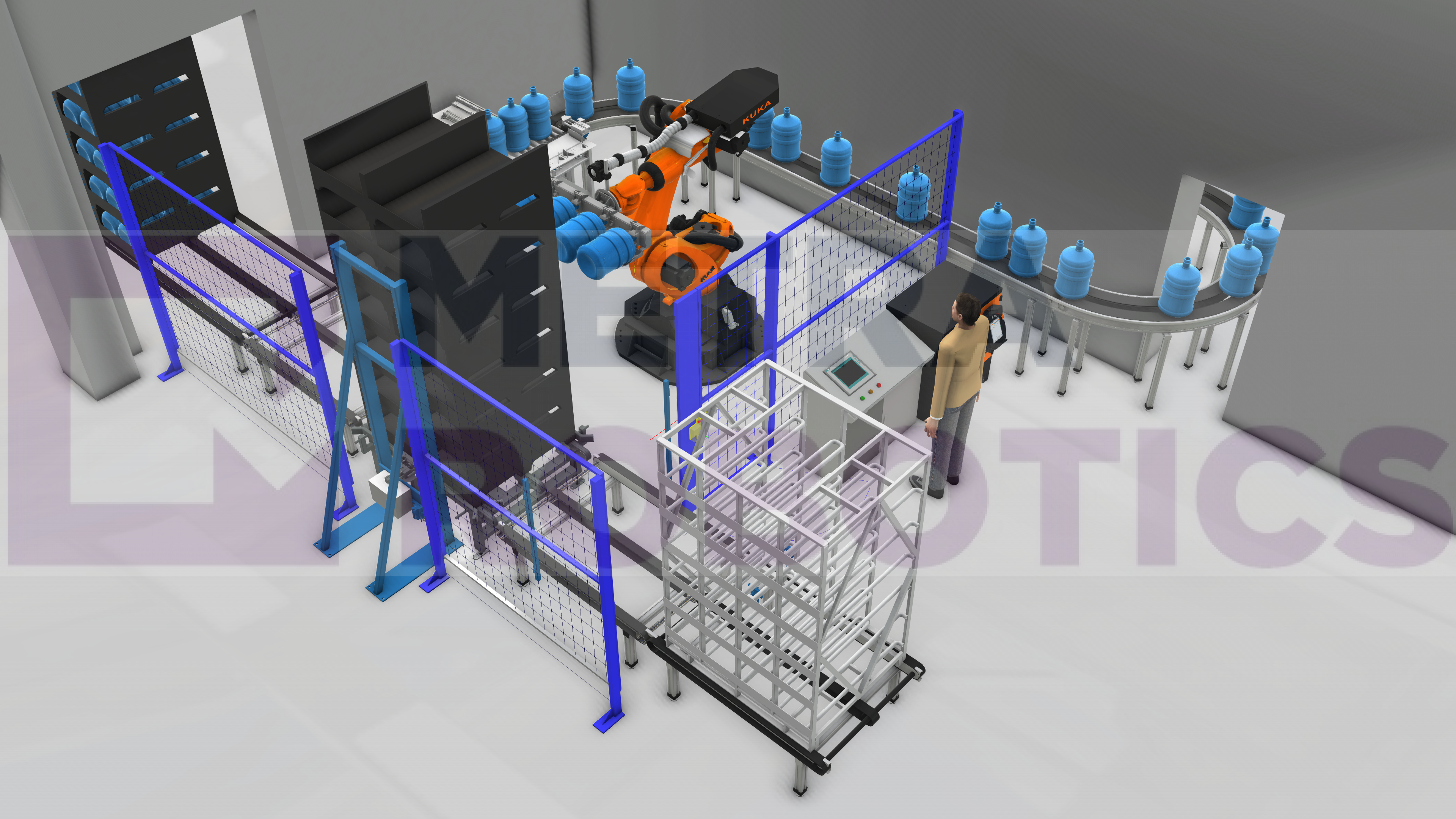
Задача комплекса: роботизированная укладка 19-литровых бутылей с водой в специальные стеллажи.
Представленный вариант имеет ручную переналадку механизмов при смене типа стеллажа. Возможна автоматизированная переналадка.
Робот грузоподъемностью 240 кг и досягаемостью 2,5 метра
Габаритные размеры представленного РТК: 6,5х9 м