Customer: furniture factory ROST, Novosibirsk
Developer: OOO NPP Metra, MetraRobotics department
Industry: furniture industry
Customer: furniture factory ROST, Novosibirsk
Developer: OOO NPP Metra, MetraRobotics department
Industry: furniture industry
Ensuring of incoming dimension control of workpieces
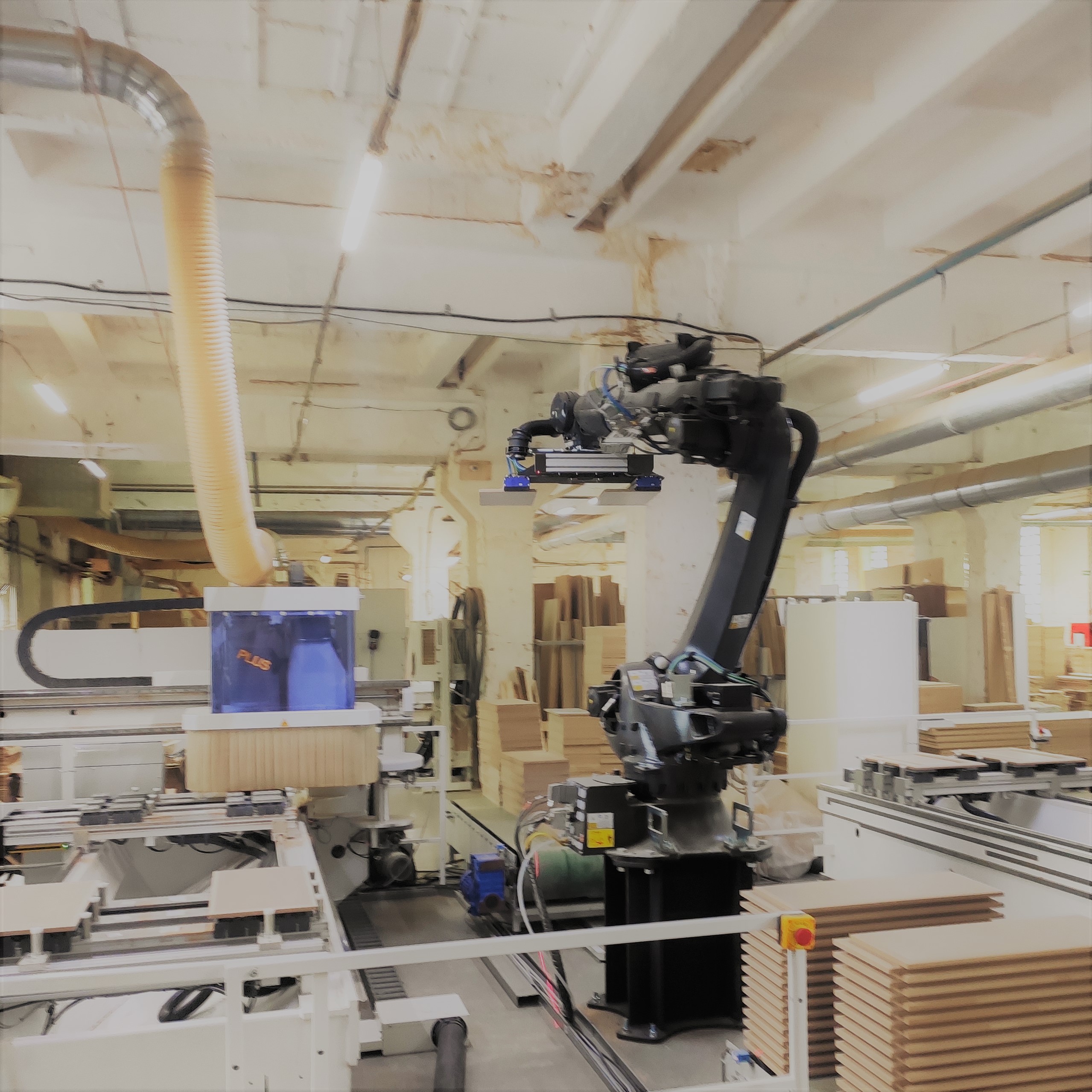
The solution includes a robotic cell, that consists of 2 processing HOMAG machines, a robot and feeding and removing conveyors.
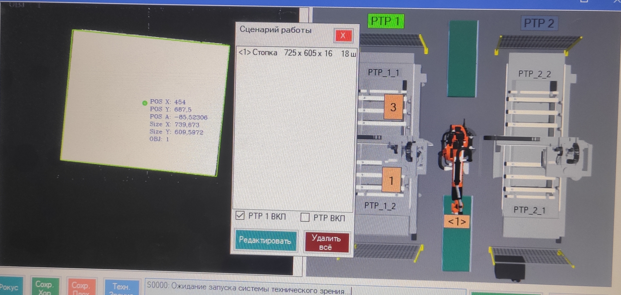
Workpieces stacked in piles are automatically fed to the robotic operational zone, where they are scanned with 3-D technical vision system of the robot, installed on the gripper.
Thanks to the specially developed for this task software we managed to achieve high indicators of robotic stability for various sizes of workpieces.
The robot uses the data received from technical vision systems and grips workpieces out of the pile.
The robot is synchronized with the machines at the level of controllers, physical signals of alarm systems, as well as control and status signals, to ensure the maximum safety.
Robot puts a workpiece in one of eight processing machine slots. After the loading the machine starts operating, subsequently processing one specific zone after another.
After processing the robot picks up the parts and stacks them on the conveyor. A stacking program is generated automatically based on the data for the parts’ dimensions. Every eleventh layer is laid with an offset to the previous one, that keeps the stack of parts complete during transportation even if the stack is higher than 1400 mm. The formed stacks are automatically removed with a conveyor out of the robotic zone.
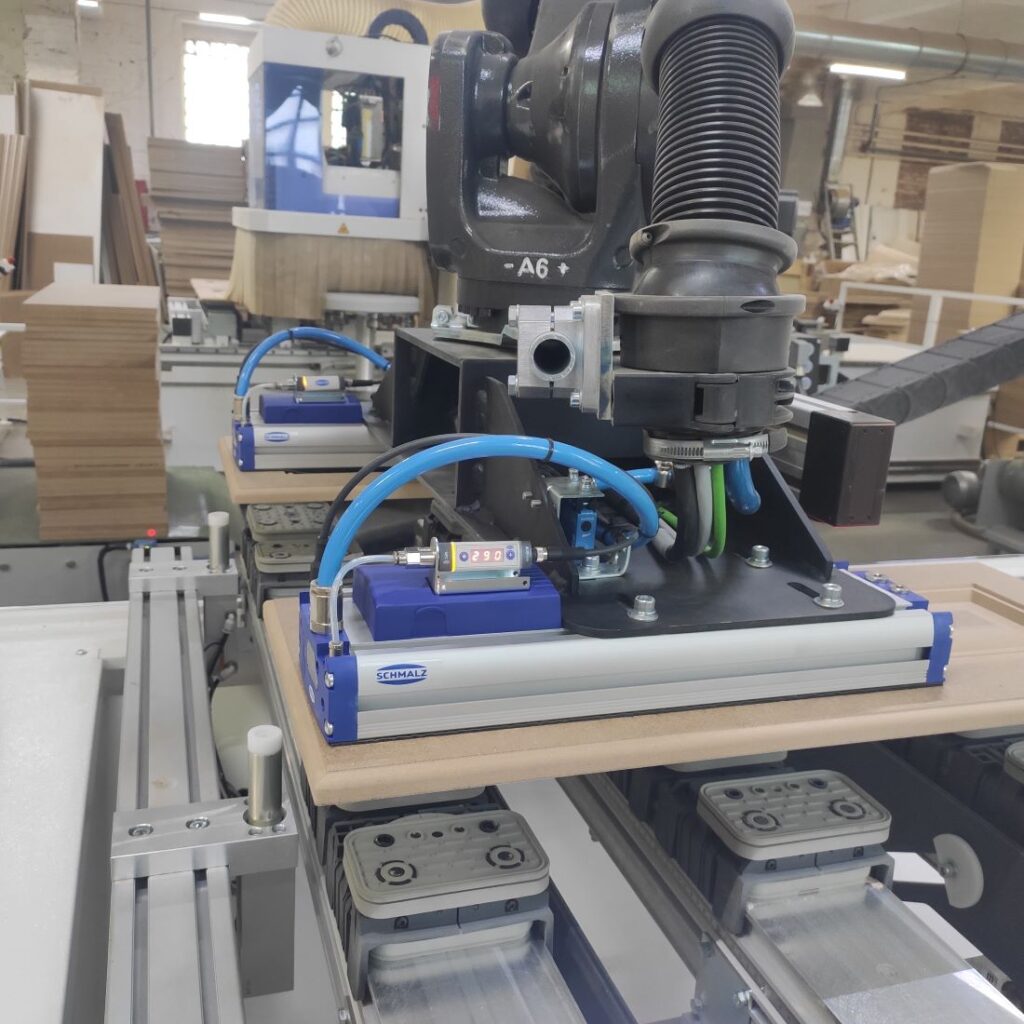
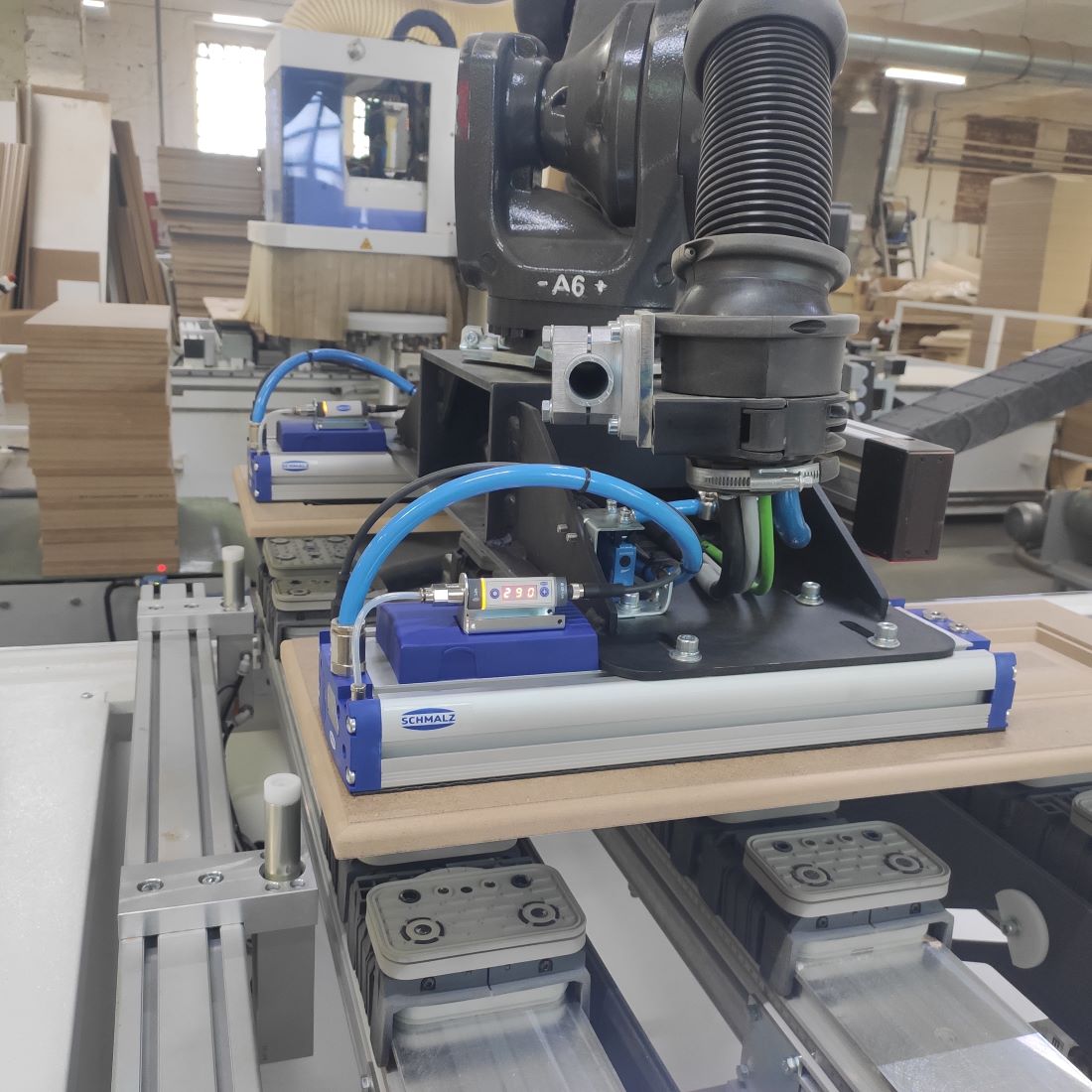
The robotic gripper has been designed with Schmalz vacuum technologies, it can operate with various dimensions of parts from 190×300 mm to 1700×800 mm.
Technical vision system allows to exclude the feeding of a workpiece with the incorrect dimensions into a machine. Scrap and failure of a cutting tool are minimized.
The robotic complex is designed for non-stop operation in 24/7 mode, an operator should monitor the presence of workpieces’ stacks on the feeding conveyor and remove the finished parts in time.
The complex is equipped with SICK safety systems, those are combination of reliable sensors, emergency- stop button, light barriers, and flexible safety controllers. Thanks to it the solution is especially suitable for companies with highest safety standards.
Внимательный подход к деталям, учёт требований Заказчика к качеству, функциональности позволили MetraRobotics разработать оптимальное решение.
